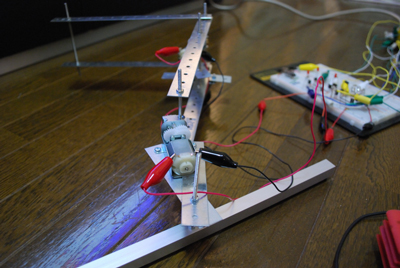
自立できるようになりました!
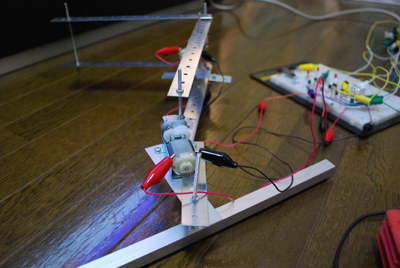
まだ安定感はないけれど、とりあえず手で支える必要はなくなりました。
まだ構造的な改良の余地はありありです。
どうでも良いんですが、「エレクトロン画伯」と名付けました。
目指すは、「へっぽこ回路工房」さんのレポート書きロボットです。
かなーり凄いので、是非見てください!
動画を見て、変化が分かるほどではないけれど・・・。
支えが出来たために、水平を保って安定な動きができるようになりました。
それからプログラムもざっくりと作りました。
線を引きたい点をファイルから読み込んで、その逆運動学を計算します。
その関節の角度に合わせて、モーターを動かすというものです。
手前の関節の動きが悪いのは、相変わらず。

そういうわけで、懐かしのトルクチューンモーターを導入。
ミニ四駆用のモーターは形状が統一されているので、全部ギアボックスに組み込めます。
ノーマルモーターなんて呼ばれているFA-130の適正トルクは10g・cmです。
それに対してトルクチューンモーターは、16g・cm。
うまくいけばトルクアップで、手前の関節もうまく動くはず。
・・・が、まわらない。
トルクアップどころか、無負荷でも回転しない。

回路に流れる最大電流を測定してみると。
モーターが2つ回っている時でも、760mAが限界でした。
FA-130でも、1つあたり1Aくらいの結構大きな電流が必要みたいです。
つまり、モーターが悪くてトルクが出ないのでなく、電流が足りなくてトルクが出ていないと。
さらに、トルクチューンモーターは、その性能ゆえに余計に大きな電流値が必要。
だから、回転すらしなかったということ。
電流値アップのためには?
・電源のレギュレータを大電流対応のものにする。
・それでも足りなければモーターごとに電源を確保。
・HブリッジのトランジスタをバイポーラからFETにする。
・または最初からモータードライバICを使う。
・・・といったあたり。
そろそろ秋葉原に行く頃ですねー。

コメント