お絵描きロボットに刺激を受けて、少し進捗の方を。
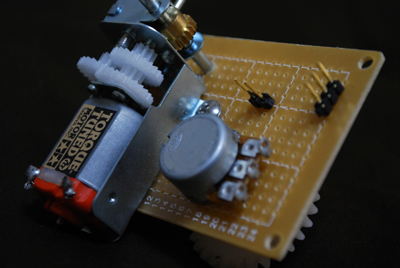
モーターのユニットらしきものを作りました。
実は作ったのは遥か昔なのだけど。
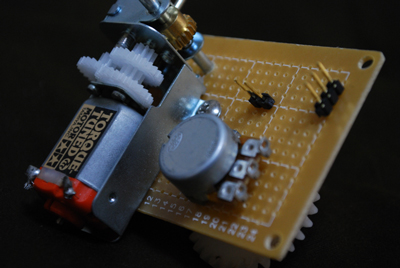
モーターとギアボックス、それから可変抵抗で構成されています。
ギアボックスで、モーターの回転を減速しトルクをあげます。
ミニ四駆のモーターの回転数はかなり高いので。
モーターの回転軸が可変抵抗に繋がっています。
したがって、可変抵抗の回転範囲以上にはモーターは回りません。
そこまでのトルクは出ないので。
そして回転に伴って可変抵抗の抵抗値が変動します。
この抵抗でもって電源電圧を分圧してAD変換すればLinuxで制御できます。
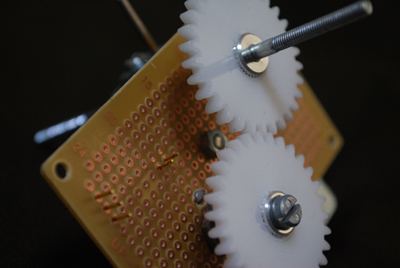
裏側はモーターの回転軸と可変抵抗の軸をギアで接続しています。
ここで更に減速することなどもできますが、していません。
要するに、ギア比は1:1です。
全く同じギアかと思えば、中心の穴の大きさが違います。
タミヤのギアボックスの軸は3mm、可変抵抗の軸は確か6mmです。
良く見ると違います。
まだ配線がなされていませんが、モーターユニットはこれで完成。
ADCと繋げば好きな角度に制御できる・・・はず。
コメント