ようやくモーターが回りました!
今回は、Hブリッジ回路を使うことで無事に動作。
モーターの回転速度を制御する方式は単純に考えると2種類。
(1)断続的に電圧を印加して、電圧の大きさで速度を調整
(2)電圧を一定に保って、電圧の印加時間で速度を調整
前は(1)の方式で挑戦したけどうまくいかず。
今回は、(2)の方式を使いました。
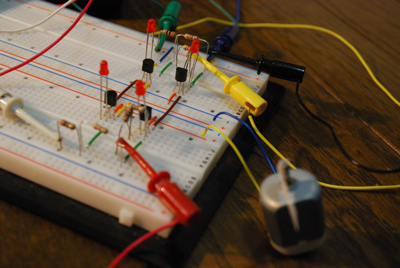
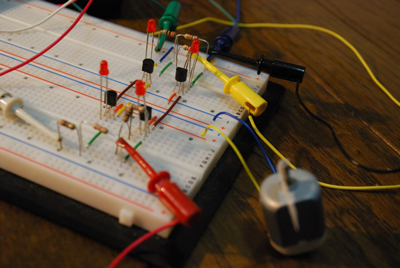
回路はこちら。
トランジスタ4つで、デジタルにモーターを繋ぎ変えます。
それによって、回転方向を変えたり、停止させたりといった動作が可能。
モーターがまわる様子を、調子に乗ってまた動画にしました。
回転が分かりやすいようにビニールテープ巻いてあります。
最初は高速回転。
一回止まって、時計回りにゆっくり回転。
一回止まって、逆回りにゆっくり回転。
また高速で、時計回りと反時計回りに回転。
・・・とプログラムしてあります。
まだフィードフォワード制御止まりです。

時計回り・反時計回り・停止の3パターンなら2ピンあれば十分に実現できます。
でも、今回は回路の簡略化のために、4ピン使ってトランジスタを1つずつ制御してます。
ちなみに、Hブリッジ回路はIC化されています。
用途に合うものがあれば、それを使った方が楽だし安心かも?
・・・とりあえず、手持ちのパーツでできるのはここまで。
ロータリーエンコーダと減速機を手に入れたら、続きやります。


コメント