試行錯誤の記録になりました。
まず、nMOSのゲートに入る電圧が低下してしまっているので、バッファをかませます。
といっても、TTLのインバータゲートICを使うだけ。
一瞬回転!
・・・するも、すぐに停止。
大電流が流れたことによって、電池の保護回路が動作したのだと思います。
ようするに電池を電源にしていては、モーターを動かすだけの電流は流せない。
ついでに、整流回路を組めそうな部品もない。

そこで、物置の奥の方から出てきた、ACアダプタに犠牲になってもらいます。
どの電化製品のためのアダプタかは忘れた。

中見ても良く分からない。
けど、とりあえずAC100VをDC5Vに変換してくれます。
定格2.1Aで電流は十分!
これを更に、自前のレギュレータに通す・・・訳にはいかない。
ので、これをそのまま電源とします。

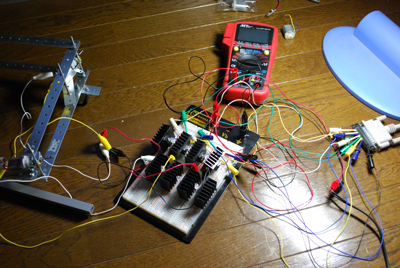
流れたー!
1.6Aオーバーで、モーターも元気よく回ってます。
5V近くかかってるから、電圧はモーターの定格オーバーだけど気にしない!
・・・が。
今度はどうやら、pMOSのスイッチングが悪い。
ちゃんとオンオフしているかと思っていたけど、実はpMOSも閾値の境界にいる模様。
そこで、pMOS側にもインバータを使用。
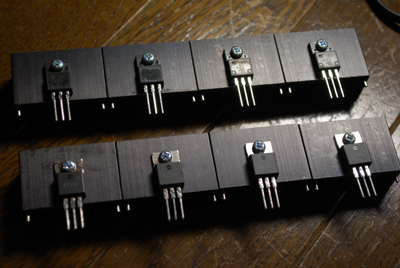
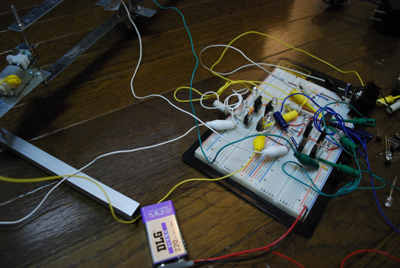
MOSがかなり熱々になるので、放熱器も装着。
壮観。
ブレッドボードが放熱器でいっぱい。
とりあえず、ロボットの腕は元気よく動いてます。
まずはモータードライバ回路の完成といったところ。
でも、フィードバックがないと、やっぱり厳しい。
腕を90度まわして90度戻しても、元の位置には全然戻らない。


コメント