
制御工学を勉強していたら、モーターを制御してみたくなりました。

思い立ったが吉日、模型屋さんでミニ四駆のモーターを購入。
少しだけ触って、様子を確認。
・0.5Vくらいかければ回り始める。定格は3V。
・電圧を上げると速く回転するようになる。
・電池の向きを逆にすると逆方向に回転する。
「モーターを制御する」というのは、「モーターの軸を一定角度でとめておく」ということです。
軸を少しまわしたら、反対方向に戻して直してくれるような。
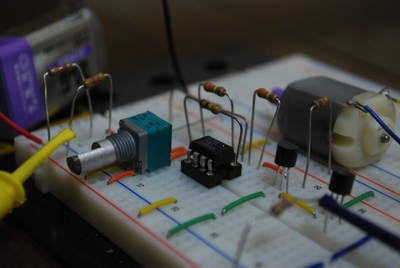
ブレッドボードにテキトーに回路を組んでみる。
実は、制御工学を生かして伝達関数とか考えようかとも考えた。
けれど、モーターの伝達関数を求められないことに気づいて断念。
とりあえず、単純にフィードバックの比例制御をすることにしました。
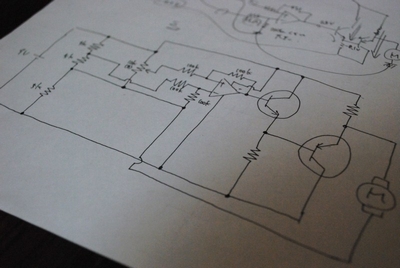
これがその回路図。
フィードバックするために、モーターの軸が何度になっているかをセンシングする必要があります。
制御工学の言葉で言えば「制御量」を求める必要があるわけです。
ロータリーエンコーダとかを使えば良いようですが、無い。
秋葉原行くの、めんどい。
ということで、可変抵抗を流用。
ヘッドホンアンプ用に買ったAカーブの中に、一つだけBカーブがあってラッキー。
回転角と抵抗値が比例関係にあるのがBカーブです。
電源を可変抵抗によって分圧することによって、回転角度を得るということです。
角度がアナログの電圧値に変換されるわけです。
同時に抵抗器でもって目標の電圧、制御の言葉で「目標値」も作ります。
それをオペアンプの減算回路でアナログ的に引き算します。
その結果は「偏差」と呼ばれます。
そして、比例制御なので定数倍して、エミッタフォロワして「操作量」が完成。
モーターに繋げば、制御できるはず!
・・・が、動かず。
たぶん、オペアンプからの電流じゃモーターは駆動できないということだろう。
結局自分だけではどうにもならず、先人たちの知恵を借りることに。
キーワードは、「トランジスタブリッジ」と「PWM制御」のようです。

コメント